reprise du blog, apres un long moment (il s’est passé plein de trucs) juste pour dire que j’ai désormais un cadre photo e-ink couleur très cool
l’ecran est tres chouette et il s’intègre super bien avec un cadre Ikea. c’est controllé par un rapsberry pi Zero wifi. il y aurait possibilité de rajouter une batterie pour avoir un truc vraiment sans fil mais finalement a moins d’avoir une grosse batterie, les solutions que j’ai vu a base de 18650 n’offrent que quelques heures d’autonomie.
du coup je débranche, et comme c’est de l’e-ink ca reste comme ca
C’est pas un truc super technique mais c’est sympa quand tout fonctionne plus ou moins du premier coup. Et puis ça m’a permis d’utiliser un peu Fusion360 qui est finalement plutot chouette pour designer ses pièces en 3D.
Le problème: j’ai plein d’outil électro-portatifs avec chacun leur cordon qui prend de la place et qu’il faut brancher/débrancher et qui n’arrêtent pas de se débrancher si on tire dessus. Je suis tombé sur une vidéo qui propose de remplacer les cordons par des prises Neutrik powerCon. Le truc c’est que le type dans la vidéo utilise des prises achetées spécifiquement pour ça.
prise neutrik powerCon
Moi il me restait quelques prises de ce type que j’ai utilisé pour mon vélo électrique. Mais une des fiches est en fait prévue pour être montée sur un mur ou un panneau, et pas attachée à un autre câble :
Du coup j’ai fait un peu de fusion 360 pour modéliser un cache, que j’ai ensuite imprimé en 3D
une fois que j’avais mon cache, je l’ai tout de même enroulé dans du scotch électrique (faute de pas avoir de gaine thermo de la bonne taille) et j’ai ensuite coupé tous les câbles de mes outils.
finalement, ça marche tellement bien (surtout le système de verrouillage) que je me demande si je vais pas aussi le mettre sur la tondeuse électrique dont le câble a tendance a se débrancher
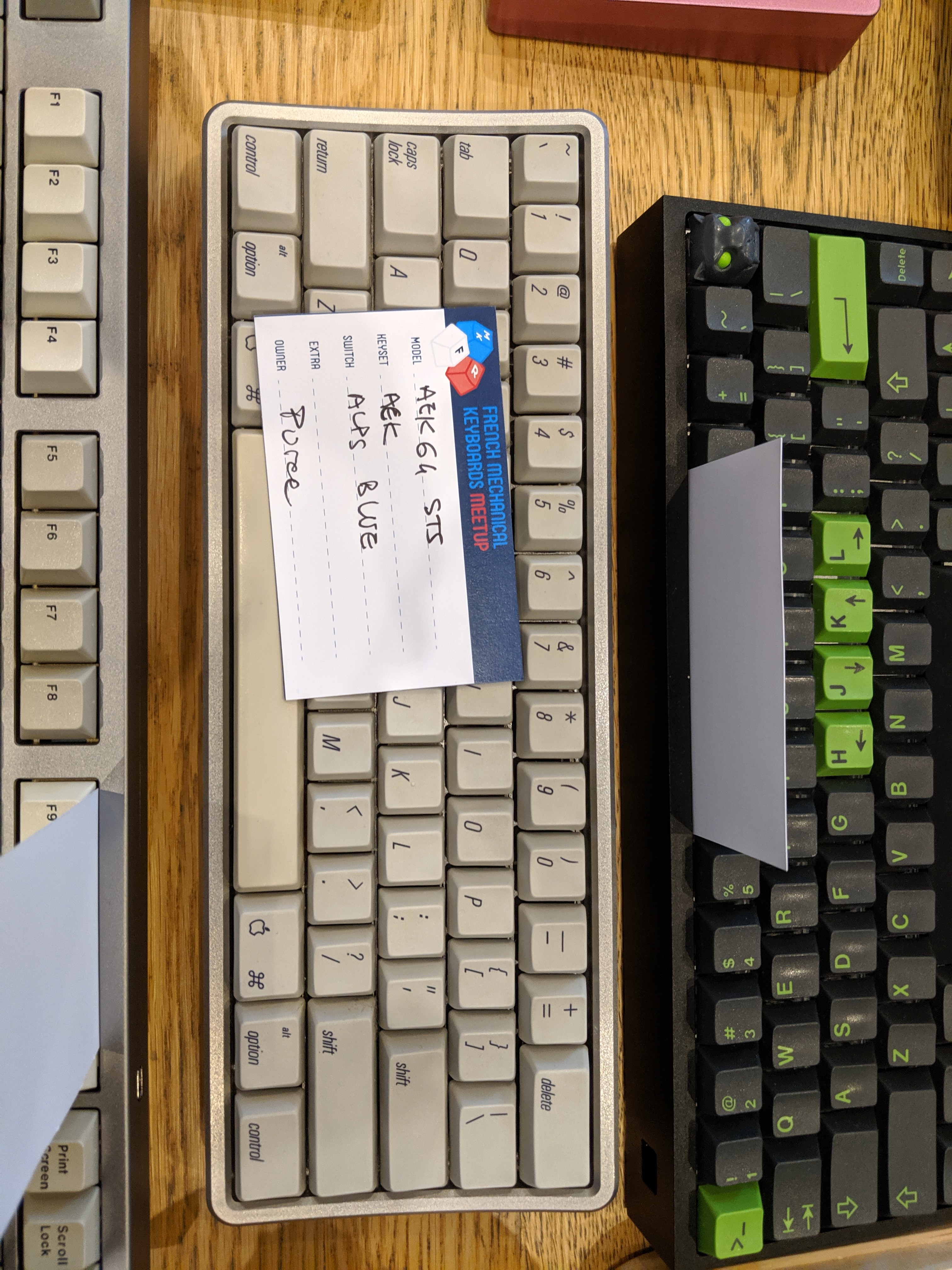
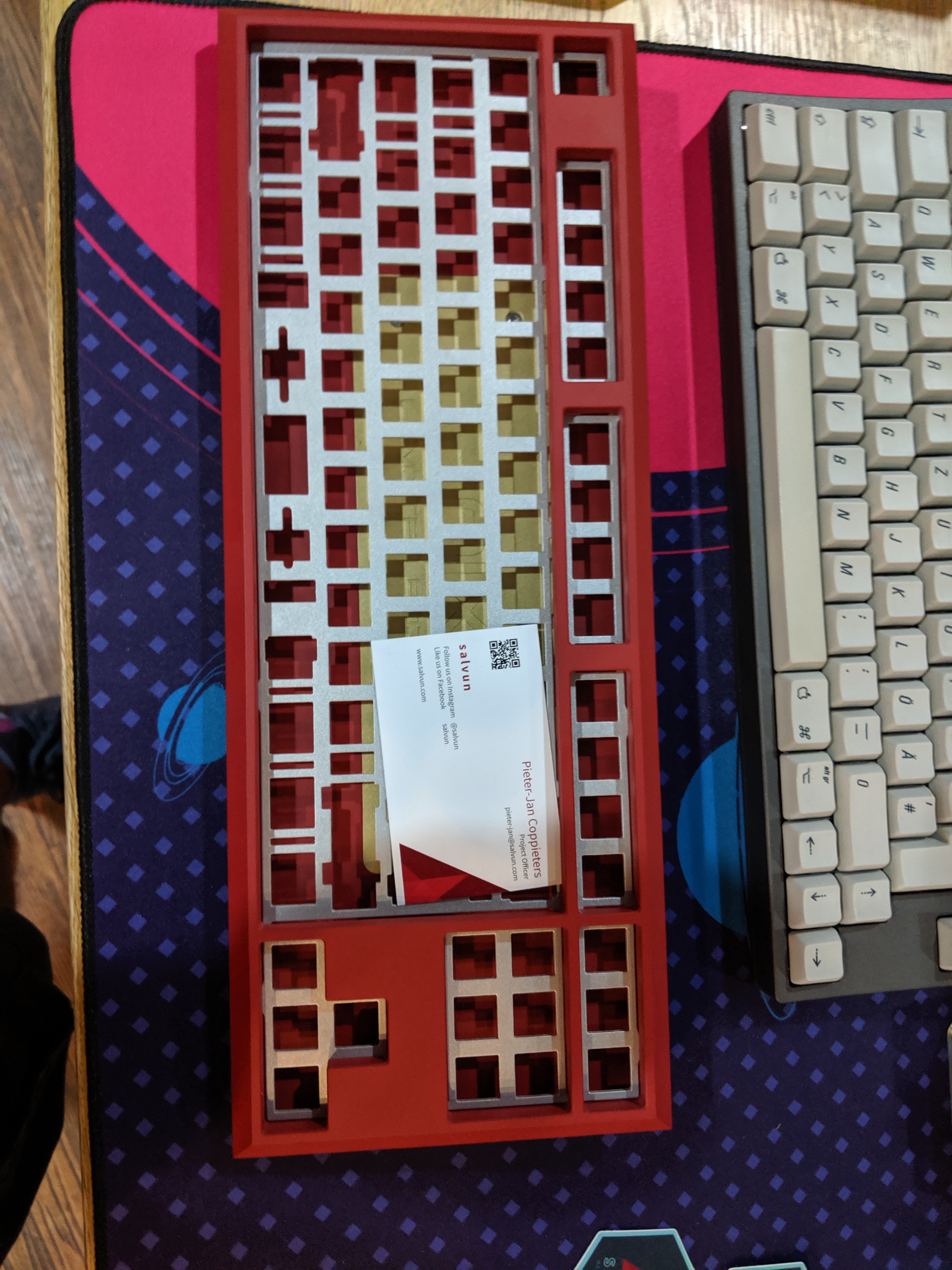
je suis en train de faire un repose-poignets pour un clavier split qui m’a l’air pas trop mal. Le but ici est de reproduire un peu l’ergonomie que j’avais avec le microsoft sculpt ergonomic (ils en ont d’ailleurs sorti un nouveau pour 2020).
un clone chinois de VE.A sous bootmapper client. J’ai déssoudé les switchs de base et remplacé avec d’autres plus silencieux et plus tactiles (Zilents V2)
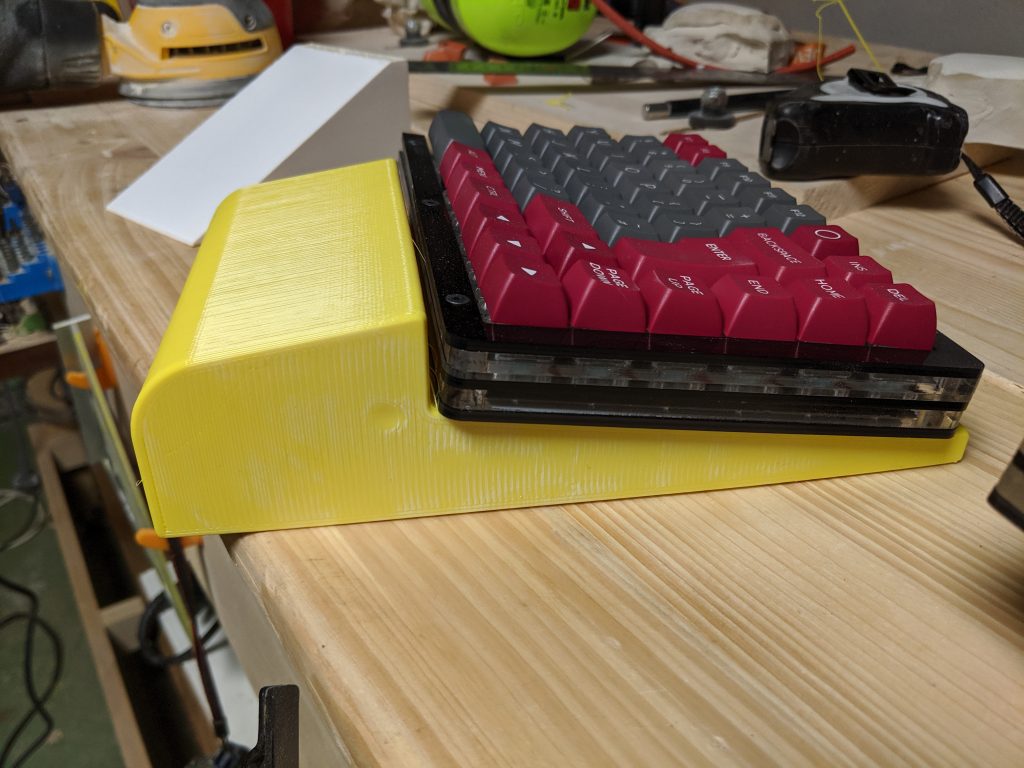
J’ai modelisé un truc rapidement sous Fusion 360 et imprimé juste une partie pour voir si le profil était correct
l’inclinaison du clavier est un peu trop forte et les bords sont trop droits
J’ai ensuite modifié un peu le profil pour avoir quelque chose d’un peu moins haut et avec des bords plus doux
J’ai également tenté de voir comment on peu supprimer l’aspect “impression 3D”. voici un test en mettant de la pate a bois (j’aurais pu prendre du mastic carrosserie aussi… j’ai fait avec ce que j’avais sous la main) et une couche de peinture blanche en bombe :
de loin ça rend pas mal mais de près on peu toujours voire un peu l’effet “escalier”. Je suppose qu’avec plusieurs couches et/ou en ponçant un peu moins fort, on peu retrouver un truc lisse.
note à part : c’est imprimé en PETG. Et je déteste, on a les inconvénients du PLA (ça se ponce pas bien) et les inconvénients de l’ABS (ça s’imprime a haute température). J’ai commandé de l’ABS pour la suite: ça sent mauvais a l’impression mais au moins il est possible en ponçant d’avoir un truc complètement lisse.
Le but ensuite est de faire un moule en silicone de ce repose poignet, afin ensuite de pouvoir le couler en résine epoxy. Comme ca j’aurais quelque chose ayant un peu plus de poids, et sur lequel je pourrais mettre des vis.
A suivre…
ah oui, aussi je me suis fait un câble USB avec des connecteurs LEMO juste pour la classe
Développement d’une app proposant de lister les dernieres sorties netflix sur les assistants Google.
Juste histoire de voir comment google cloud platform fonctionne, je suis en train de dev une action Google Assistant qui répond à un de mes problèmes : “qu’est-ce qu’il y a de nouveau sur Netflix aujourd’hui ?“. J’ai choisi GCP car je bouffe pas mal d’AWS au boulot et j’aimerais bien voir ce à quoi ressemble la concurrence. Idem, je dev en python principalement pour me changer du PHP (il y a donc des chances qu’il y ai du code pas beau du tout dans ces pages).
Etape 1 : création d’une app serverless qui chope les dernières sorties Netflix
en regardant rapidement j’ai trouvé ceci : https://www.justwatch.com/ qui dispose d’une API qui liste, entre autres, les sorties netflix.
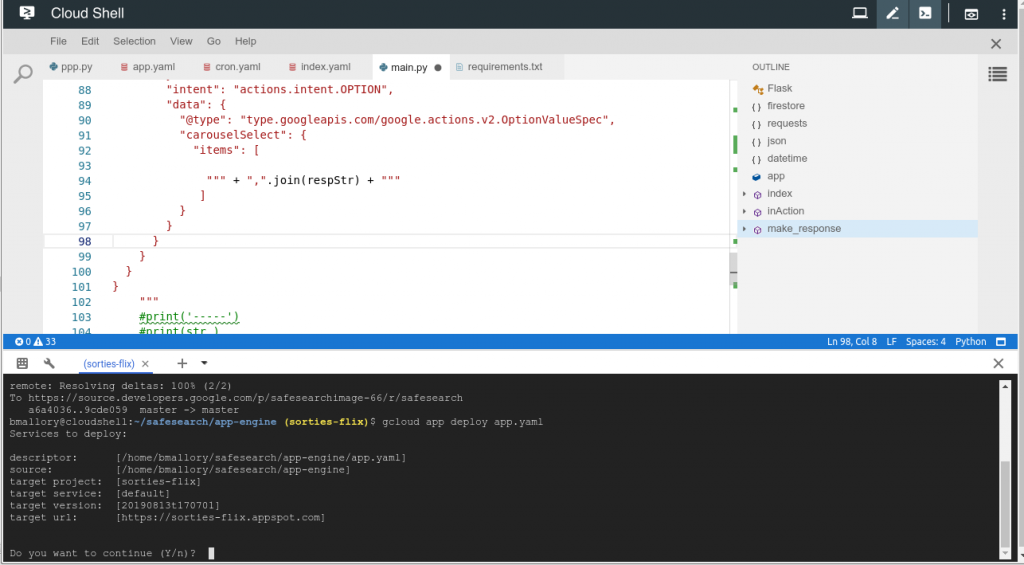
l’environnement de dev sur GCP est pas trop mal pour qui ne veut pas installer plein de trucs. Google met à disposition une petite machine et un éditeur ainsi que tout ce qu’il faut pour se créer son environnement, le tout dans un navigateur
l’environnement de dev de GCP
on a juste a écrire son code python, remplir son app.yaml et l’envoyer dans le compute engine de google.
Stockage des données : Firestore + bucket public
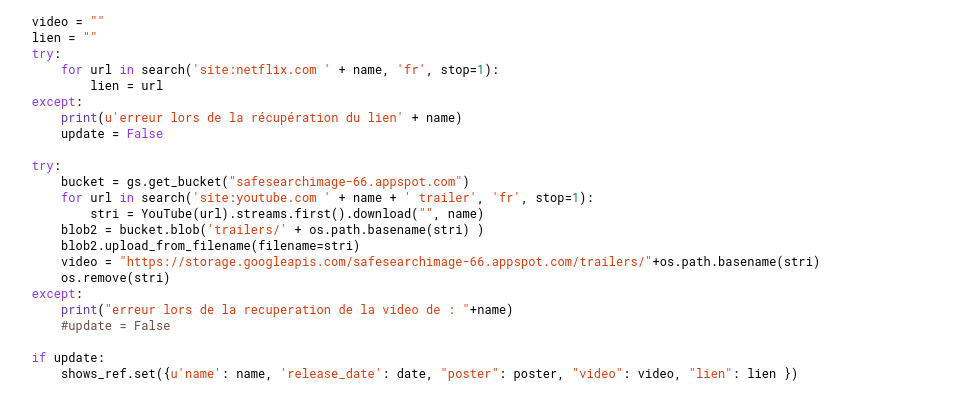
j’ai donc fait un petit script lancé tous les jours qui interroge une API pour connaître les dernières sorties, puis prend le premier résultat Google sur une requête “site:netflix.com [nom série] ” afin de récupérer le lien de la série ou film sur netflix, puis je fais la même chose pour youtube afin de récupérer le trailer.
le cron d’indexation
on balance ensuite tout dans un bucket pour les trailers, et dans Firestore pour les données
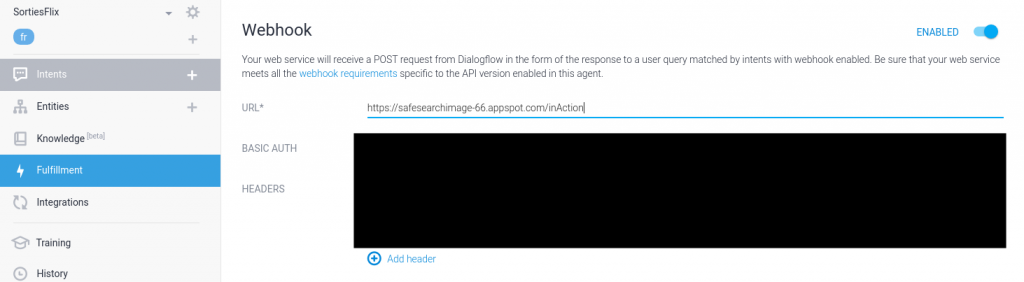
J’ai ensuite créé une “action” Google Assistant qui liste les 10 dernières entrées de cette base. La partie dialogflow est assez simple, le seul truc intéressant est la partie où l’on dit d’interroger une url spécifique pour répondre à la demande
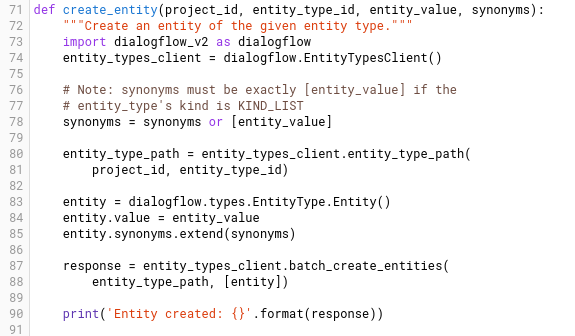
ainsi que le cron d’ajout d’entité a dialogflow afin qu’il puisse reconnaître les différents film et séries au fur et a mesure que l’on alimente la base de données
J’ai essayé d’afficher de la vidéo dans Google Assistant, mais je n’ai pas trouvé comment. Au jour d’aujourd’hui, je ne fait que balancer l’image et un lien vers Netflix, alors que je m’embête à récupérer le trailer. J’utilise les rich responses de Google. Ca reste assez limité, on ne peut donner qu’un seul lien web sortant et cela ne marchera que sur les téléphones. J’aurais bien aimé afficher le trailer dans le cas de device avec écran mais si on a bien un truc prévu pour lire de l’audio :
on n’a rien pour de la vidéo. Je ne suis même pas sûr que l’on puisse interlinker pour renvoyer sur youtube par exemple.
Bref c’était marrant, a l’utilisation je trouve le truc un peu plus intuitif qu’AWS. notamment au niveau de l’interconnexion entre les différents services (stockage, bdd, assistant, etc.)
J’ai enfin assez avancé pour faire un test sur route. Verdict : ça trace ! Je pensais avoir sous évalué le contrôleur de vitesse, un kls7212s avec 50A en continu, boost 120A sur 20secondes a 72v. Upgradé depuis a un nucular 12f 100A continu avec un boost a 200A ou 300A, je ne sais plus
En charge avec panneau latéral ouvert
Ben même en mode éco (j’ai pas encore soudé le switch permettant de changer en full speed). Je ne suis jamais allé a fond. J’avais peur que de laisser un gros moteur sur la roue arrière ne fasse perdre du couple par rapport a des designs avec moteur central tel que le sur-ron mais finalement, et toujours en mode éco, j’en ai plus qu’avant malgré la roue plus grosse, le poids plus élevé (52kg). Les repose-pieds aident bien au maintient de l’équilibre, plus que les pédales.
Au final, je pense que j’ai plus de couple et de vitesse max qu’une super soco TC que j’avais testé et que je lorgnais depuis un moment, et ça se rapproche plus d’un sur-ron, sauf que c’est totalement silencieux contrairement à la sur-ron (que j’ai testé aussi) qui a un entraînement par chaîne. Le rapport poids/puissance aide bien.
Guidon épuré avec juste une gâchette de gaz et une visu du voltage
J’ai viré les poignées tournantes pour le gaz : j’ai jamais aimé, ça casse le poignet. Ici on a bien le guidon en main. J’ai mis les freins dans le bon sens : avant a gauche, arrière a droite ! Le frein arrière fait un drôle de bruit (mais freine fort) : je pense que mes juicy 3 ont finalement rendus l’âme et j’attends des Magura mt5 4 pistons.
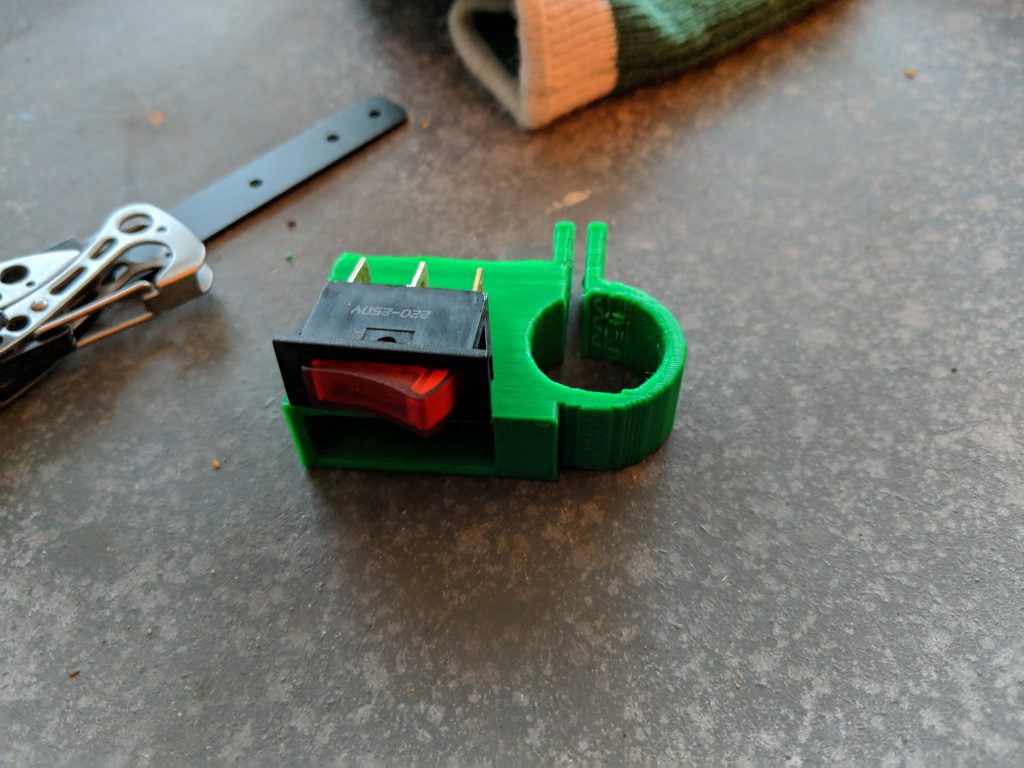
Switch de phare
Le phare avant n’est pas encore câblé. Je me suis 3d imprimé un truc pour le mettre sur le guidon que je compte peindre en noir
Enfin fini de trifouiller la batterie, je peux maintenant avancer un peu sur la partie cycle
C’était marrant de monter la roue arrière avec les démonte-pneu de moto. Beaucoup plus facile que les truc minuscules prévu pour les vélo, pour peu qu’on ai vu les tutos pour le faire correctement (j’ai tout de même réussi a percer une chambre à air avant de voir lesdits tutos).
Le reste est beaucoup plus facile a monter-remonter-demonter a force d’habitude.
Il me reste quelques branchements a faire la semaine prochaine et je pourrais faire le premier test.
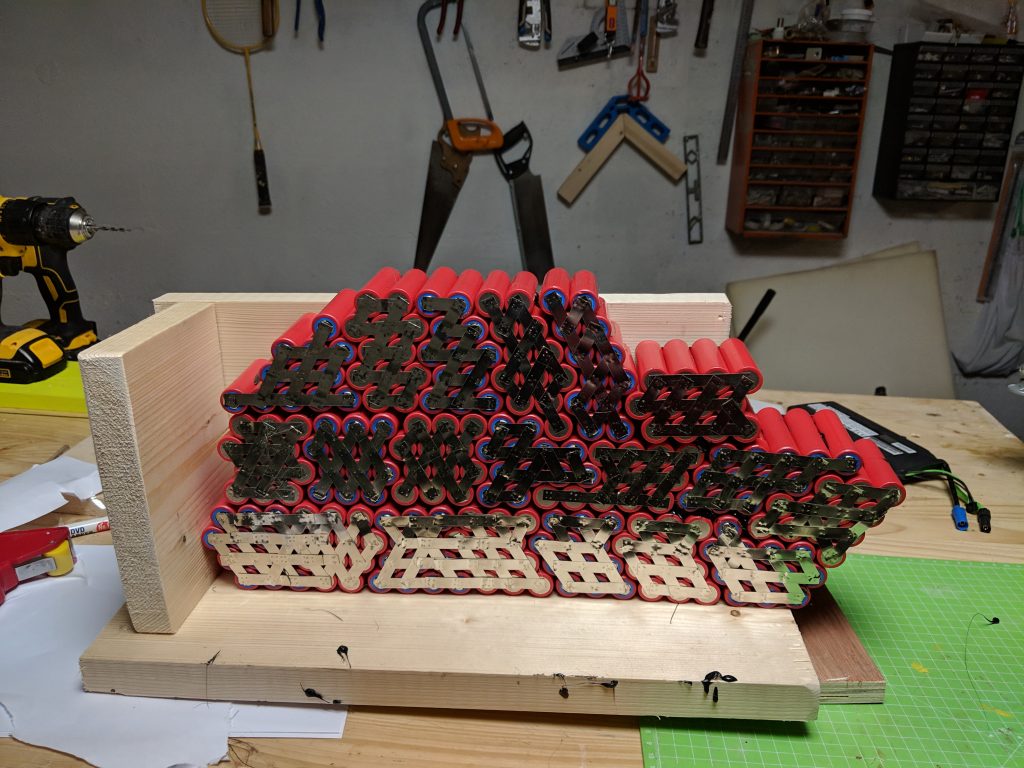
encore un post au sujet de la batterie. Bah oui ca prend du temps. Elle est complètement soudée
J’ai recu le BMS et les cables (25mm2 de section, ca fait des gros cables) et j’ai pu fait un test de montage. Voici donc ce que ca donne :
Le BMS rentre bien.
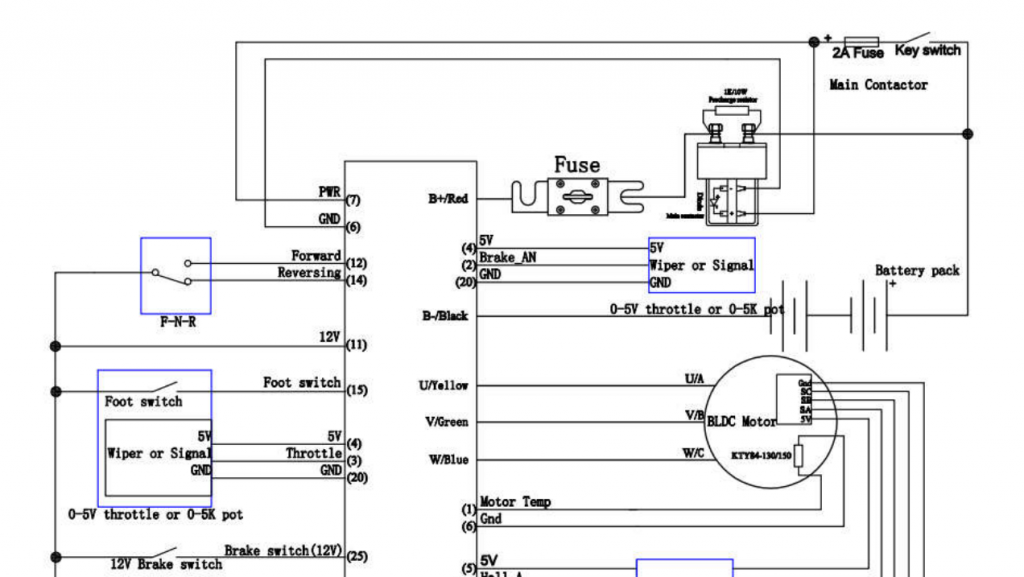
Le schema de montage avec le contacteur est un peu compliqué et vu la taille de ce dernier, je me demande encore où je vais le mettre…
Selon ce schéma, il y a une résistance toujours connectée, de manière a laisser les composants du controlleur de vitesse alimenté (il y a un peu moins de pression sur les composants s’ils sont alimentés avant le circuit alimentant le moteur). et j’aimerais bien pouvoir débrancher par un switch cette résistance. D’après les calculs, sur une batterie 3KWh, ca se vide en 24 jours sinon….
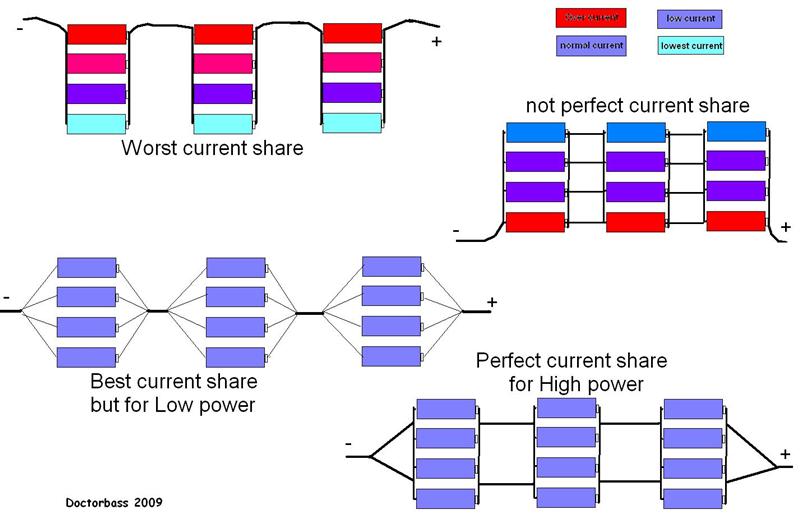
J’ai décidé de modifier un peu les composants que je comptais utiliser pour la batterie. Après avoir lu différents posts sur cyclurba de personnes ayant sous dimensionné les câbles de leur batterie et qui se retrouvent avec des baisses de tension chaque fois qu’on tire sur la batterie, j’ai décidé de passer de câbles de 8mm² à des câbles de 25mm². J’ai aussi récupéré des cosses en cuivre dimensionnés pour 200A.
Afin également de ne pas souder le câble de décharge directement sous une cellule (donc de la fatiguer), j’ai acheté des barres de distribution. Le but est d’éviter d’avoir trop de résistance entre chaque cellule d’un même pack parallèle afin de bien tirer du courant sur l’ensemble des cellules et pas juste celles les plus proches du câble de décharge
Du coup j’ai acheté 2 truc comme ça
Barre de distribution 100A
J’utiliserai juste la barre qui est du cuivre (4 fois moins de résistance que l’acier) plaqué de nickel (que je pourrais donc souder)
Vérification qu’il s’agisse bien de cuivre
Je souderai cette barre directement entre mon câble de décharge et le premier bloc de cellule (idem pour le dernier bloc)