Author: Sendai
-
Le projet du skate électrique
Alors ça faisait un moment que ça trotte dans ma tête… Maintenant que je sais faire tourner des moteurs avec ce que j’ai appris en construisant des drones et avions, je voulais voir si je pouvais passer à plus gros (et plus marrant). J’ai essayé de me faire un skate électrique. Venant des drones, la partie électrique est toute simple, c’est juste un moteur et un contrôleur de vitesse.
La ou j’en ai particulièrement bavé c’est toute la partie mécanique. Il y a des contraintes de forces assez élevées et pas forcément un pas de vis ou quelque chose sur quoi attacher, j’ai vraiment beaucoup galéré avant de trouver comment souder correctement la monture du moteur au truck (le support pour les roues du skate). La première monture était d’ailleurs trop souple et se tordait après chaque petit coup sur la route. Il a fallut que je soude ensemble deux plaques d’aluminium de 3mm pour avoir assez de rigidité (par ailleurs je sais maintenant que le béton ça fond quand on y met une flamme de 3000°C !).
Il y avait aussi le fait que la chaîne n’était pas assez tendue. Ça provoquait des chocs moteur lorsque par exemple en descente j’actionnais les freins. J’ai donc vissé un tendeur de chaîne. Ajouté un peu de graisse et ça a l’air d’être bon (pour l’instant).
Si c’était à refaire, je prendrais des kits tout fait (ça existe, ça permet de transformer n’importe quel skate en skate électrique). C’est beaucoup moins prise de tête !
Enfin, pour info je fais 5-6 km sur une batterie (j’en ai 4) à 18km/h. J’ai la possibilité de monter mes batteries en parallèle, pour plus d’autonomie, ou en série pour plus de vitesse (j’en suis pas encore là, j’essaye déjà de pas me casser la figure).Photos et vidéo pas loin :

stats pour une batterie LiPo 4S (16v) 5800mAh (poids 580g) : http://goo.gl/Sx8MJE
Distance totale : 5,96 km (3,7 mi)
Durée totale : 23:55
Durée du déplacement : 21:00
Vitesse moyenne : 14,95 km/h (9,3 mi/h)
Vitesse moyenne de déplacement : 17,02 km/h (10,6 mi/h)
Vitesse max. : 17,50 km/h (10,9 mi/h)
Vitesse moyenne : 4:01 min/km (6:28 min/mi)
Allure moyenne : 3:31 min/km (5:40 min/mi)
Vitesse maximale : 3:26 min/km (5:31 min/mi)
Élévation max. : 184 m (605 pi)
Élévation min. : 166 m (545 pi)
Dénivelé : 260 m (853 pi)
Inclinaison max. : 45 %
Inclinaison min. : -9 %Prochaine étape : rajouter des leds RGB en dessous pour faire le jacky (ouais ouais !)
-
nacelle brushlesss
alors j’ai fait un nouveau pod camera pour mon skywalker :
il y a une nacelle qui garde la camera à l’horizontal.
en vol ça donne ça :
par contre les dampers en caoutchouc rebondissent et font trembler la video. J’essayerai sans… -
The mothership (fin)
Alors, ca vole, plutot bien même !
Le comportement est beaucoup plus sain que le bixler. Ca ne décroche pas tout de suite lorsque l’on coupe les gaz. Ca s’oriente bien face et dos au vent, ça ce lance bien, sauf quand on a l’habitude de lancer les avions avec les gaz a fond comme un bourrin. Là l’hélice (une 12 pouces) pousse trop fort et je n’ai pas pu retenir l’avion (c’est le crash du tout début de la vidéo).Je suis assez content parce que, contrairement a d’habitude, cet avion a survécu à son premier vol. Je vais donc pour commander quelques pieces pour le rendre encore plus chouette à savoir :
– 1 ou 2 batteries 4S 5800mah (je vole actuellement avec 2 4S 4000mah). Ces batteries aideront à l’équilibrage de l’avion et auront une capacité légèrement plus élevée que ce que j’ai. Ce qui permettra de rester plus longtemps en l’air.
– 2 antennes dipoles 433mhz. Pour mettre sur le récepteur, dans l’avion, afin d’être sûr d’avoir le meilleure réception possible et ne pas perdre les commandes à 2Km.Il me reste egalement des trucs a configurer au niveau de l’OSD. Je n’ai pas paramétré l’indicateur de qualité du signal par exemple. Ah, et il y a un peu de jeu sur le servo sur lequel est placé la caméra. Je pense que les vibrations que l’on voit dans la vidéo viennent de là.
(le deuxieme servo, celui le plus a droite ) :
-
The mothership (4)
Voilà c’est terminé (presque) :
Il y a juste une plaque intérieure à coller. J’ai noté l’emplacement des batteries pour avoir un bon équilibrage.
Il faudra bien avancer la batterie dans le cas d’un vol à une seule batterie. Du coup j’ai aussi noté pour utiliser deux batteries en parallèle (des 4000mah quand même) le plus simple serait de prendre une 4S 5000 ou 5800.
En attendant que ça sèche j’ai rajouté des lignes sport pour faire le kéké
j’ai également passé l’après midi d’hier a configurer le controleur de vol et l’osd. En théorie, le retour au point de départ par navigation GPS me semble bien configuré. Le systeme pan est également assez chouette.
d’autres photos du truc plus ou moins finalisé. Je pense que la prochaine mise a jour sera pour le premier vol (ou premier crash, c’est au choix).
-
The mothertship (4)
Nouvelle mise a jour :
j’ai bossé sur un systeme pan pour les camera pendant que j’attends du ruban cuivré pour faire mon truc de cage de Faraday.
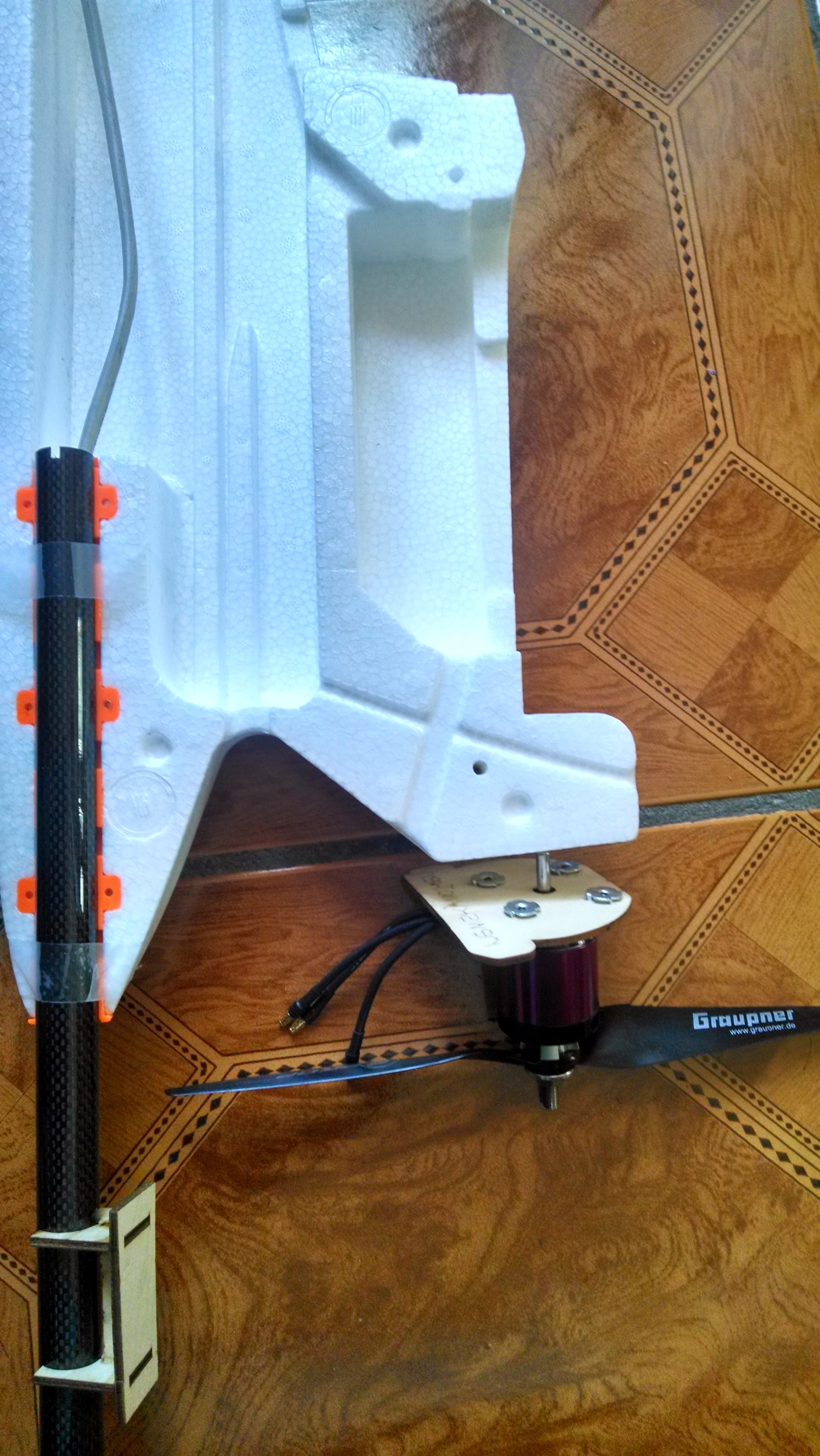
j’ai également reçu le moteur (fiche technique ici)) :
le moteur est bien gros et a mon avis fera tourner une helice 12 pouces sans problème. En regardant rapidement je crois meme qu’il y a moyen de mettre du 13 pouces :
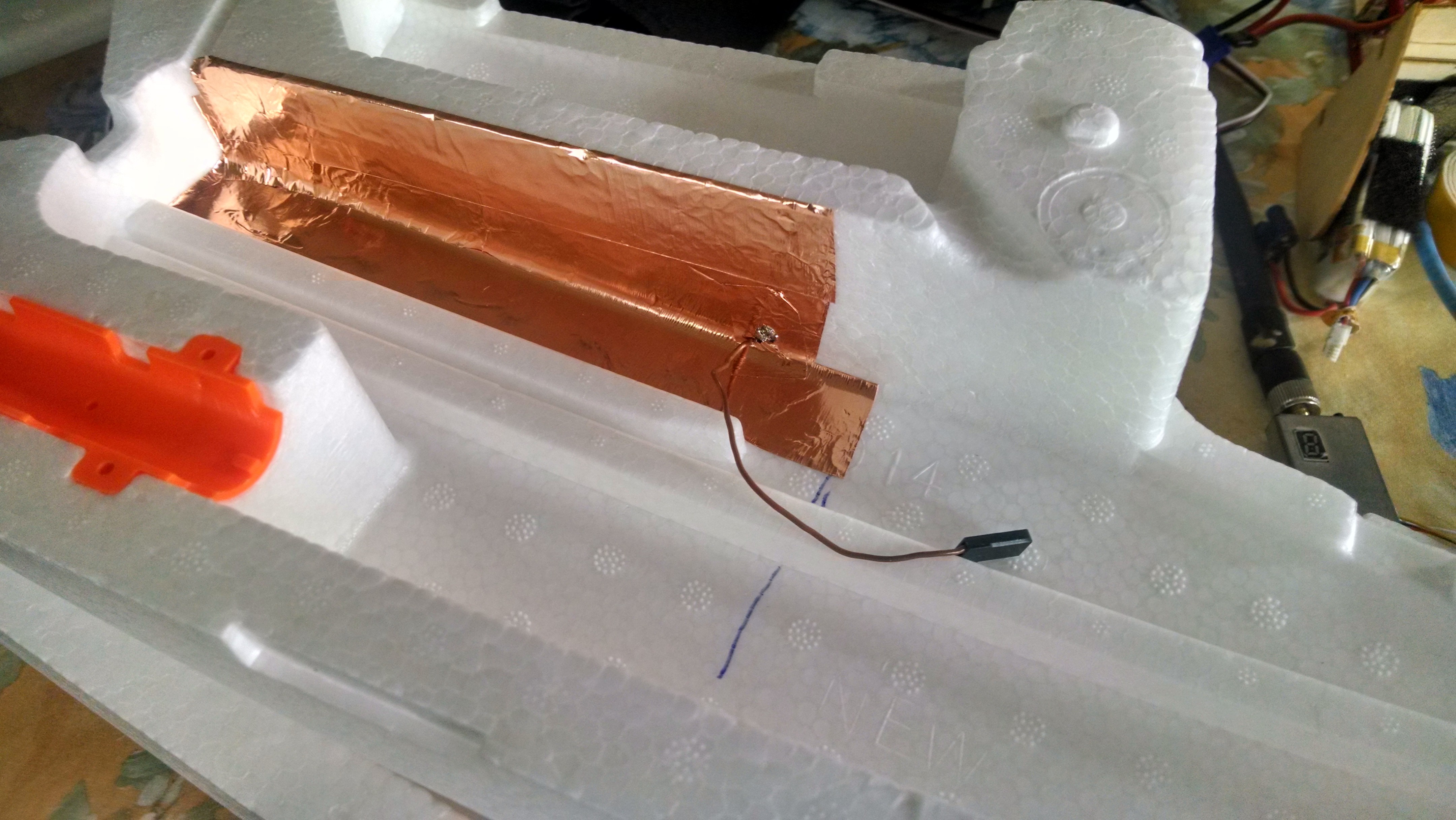
Enfin, j’ai finalement recu mon ruban et voici ce que ça donne :
j’ai même soudé une prise servo avec la masse uniquement que je mettrais sur une voie inutilisé de mon controleur de vol.
-
The mothership (3)
Aujourd’hui c’est soudure. Plus j’en fais et plus je n’aime pas ça.
La partie électronique contient donc :
– un autopilote
– un osd
– un esc
– un bec 5v et un bec 12v (l’un alimentant l’osd et l’autre la partie vidéo)J’ai choisi de partir sur une carte naze32. Le mode avion est un peu laissé pour compte par rapport aux modes multirotor (le support du retour au point de départ par navigation gps par exemple est toujours expérimental), mais c’est la carte qui m’est la plus familière et avec laquelle j’ai déjà un peu d’expérience en mode avion.