Alors, j’ai commencé à coller les parties pas importantes… J’ai essayé de voir comment agencer les pièces à l’intérieur du fuselage :
Je pense que je vais remplacer les rallonges de câble des servos de la queue par du rj45 qui traînait : il y a bien les 6 fils dedans, et le câble est blindé. Ça évitera que ça fasse antenne.
Je verrai si je peux le faire sur chaque aileron également… Le truc c’est que le câble est un peu plus lourd. Je suppose que je ne suis pas a ça près vu l’envergure, mais bon… D’ailleurs j’aimerais bien faire une espèce de cage de Faraday au niveau de l’électronique avec du grillage en cuivre… Je suppose qu’on peut éviter les faux contact en mettant du vernis ou autre dessus, à voir…
Alors, j’ai reçu un kit pour un nouvel avion destiné au vol fpv : un Skywalker 2014 en version 1900mm (il s’agit de l’envergure).
Le principal défaut de mon bixler est qu’avec toute l’électronique, l’avion est un peu trop petit et c’est souvent la galère pour changer les batteries. Avec tous les fils qui s’entrecroisent, j’ai déjà fumé un carte de contrôle à cause de faux contact, arrivé sur le terrain de vol et me rendre compte qu’une soudure avait lâché (30min de trajet pour rien donc) et d’autres trucs bien intéressants.
Le but du Skywalker est d’avoir un montage clean dès le départ et de profiter de toute la place. Certains montages arrivent en plus a faire voler cet avion pendant 45min/1h, ça changera des 10min des quadcopters.
Les photos !
L’avion est pensé pour du vol fpv : la canope se divise en deux et à été percé pour qu’on puisse y loger un servo permettant d’incliner la caméra. Ils ont fourni un support que l’on peut placer sur la queue de l’avion pour y placer un récepteur ou un émetteur vidéo (même si l’idéal serait de mettre l’un et l’autre sur chaque aile). Le truc accepte des hélices de 12 ou 13 pouces, je ne sais plus, et il est de toute façon très facile de faire un support pour surélever le moteur pour en mettre une plus grande. Il y a un système de verrouillage d’ailes et de queue, un simple tournevis permet de tout démonter et mettre dans le coffre de la voiture.
Bref ça va être marrant. Avec 1m90 d’envergure je vais pour planer pendant des heures.
– note pour les débutants en avions si vous venez des multirotors : lancez l’avion en mode stabilisé. C’est beaucoup plus facile. Mon premier lancé en manuel a finit en noseplant 10 secondes plus tard. d’ailleurs j’ai été plus ou moins malin en ne mettant pas la caméra sur le nez pour un premier vol.
– second point : j’aime bien mon design fait de modules tenus par des bandes de velcro. Dans le cas du noseplant justement, la plupart de l’energie à été absorbé par l’éjection des modules et au final je n’ai eut aucune casse, ce qui m’a permis de voler après.
– il y avait 40km/h de vents (et des rafales bien dégueulasses). Ca tremble un peu mais c’est plutot sympa. Ca change vraiment du multirotor (en dehors des temps de vol plus long) car en fait, la on peu admirer le paysage.
– étant habitué à faire voler des drones, j’ai l’impression d’utiliser beaucoup trop le gouvernail.
– enfin, la mobius action cam : c’est mon premier film en situation (avant je n’ai fait que des essais). j’aurais dû acheter cette caméra plus tot : elle est 4 fois moins chère qu’une gopro, plus légère, on peu la coller partout, et on peu regler la balance des blanc, la saturation, contraste etc. La vidéo est brute de camera, j’avais réglé le firmware en augmentant légèrement la saturation. je suis plutot satisfait du résultat.
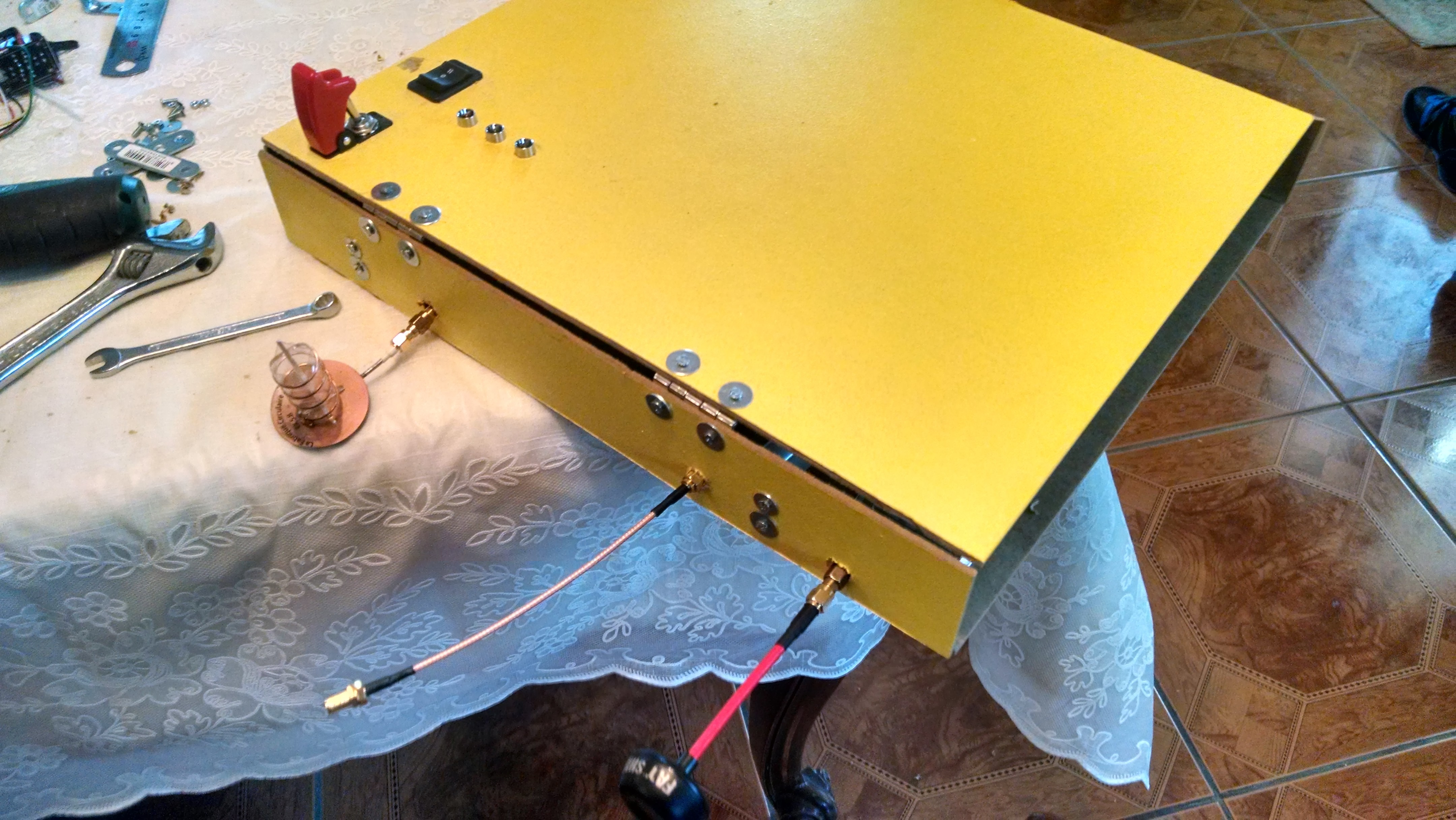
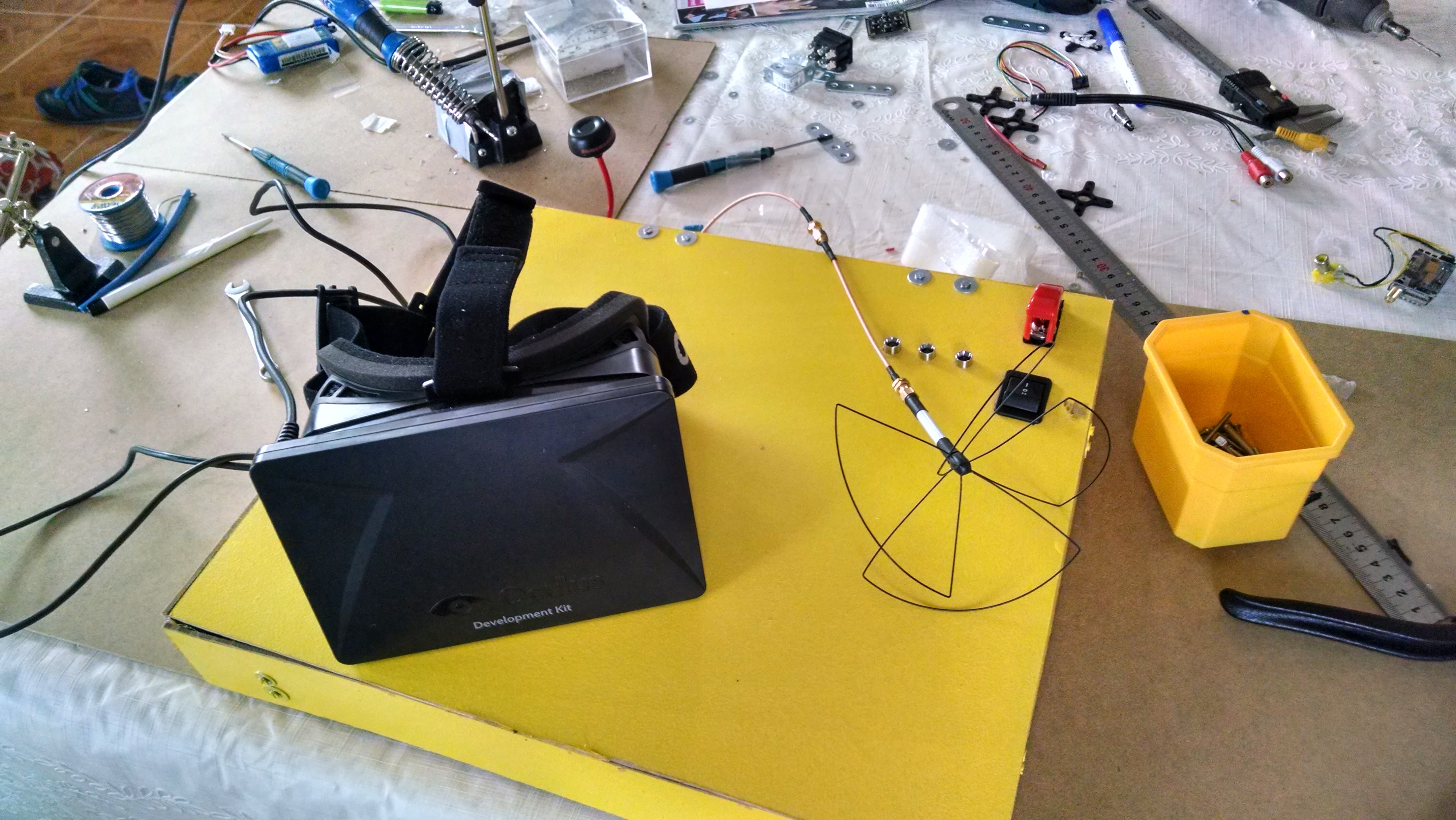
Une première version est terminée. Il y a bien le cablage entre les différents recepteurs et le Rift, ainsi que le switch entre la réception 1.2Ghz et 5.8Ghz :
il manque la fonction “relais” et l’enregistrement du flux vidéo. En fait, je n’ai pas assez de sorties vidéo RCA et il faudrait que j’achete un ampli vidéo comme celui-ci :
en attendant de commander ce truc, La prochaine étape est de faire quelques vols. Ca fait un moment que je n’ai pas volé sérieusement.
Alors voilà, j’ai une de mes paires de lunettes vidéo qui m’a lâché il y a quelques mois. Et j’ai récemment reçu de quoi faire sortir du hdmi sans latence (avec ou sans 3d et au format oculus rift !). Du coup je suis en train de remettre à plat mon système de réception vidéo au sol.
Le truc que j’aimerais avoir est :
– être capable de recevoir sur 5.8ghz et 1.2ghz,
– utiliser la ground station comme un relais comme je le faisais déjà avant : le relais reçois sur 1.2ghz et renvoie sur 5.8ghz. Comme ça toute la distance entre le drone et la réception est faite sur 1.2ghz (le signal est plus solide sur cette frequence) et le relais renvoie à une ou plusieurs paires de lunettes sur 5.8ghz.
– enregistrer le lien vidéo (pas depuis la cam hd mais le lien vidéo reçu dans les lunettes).
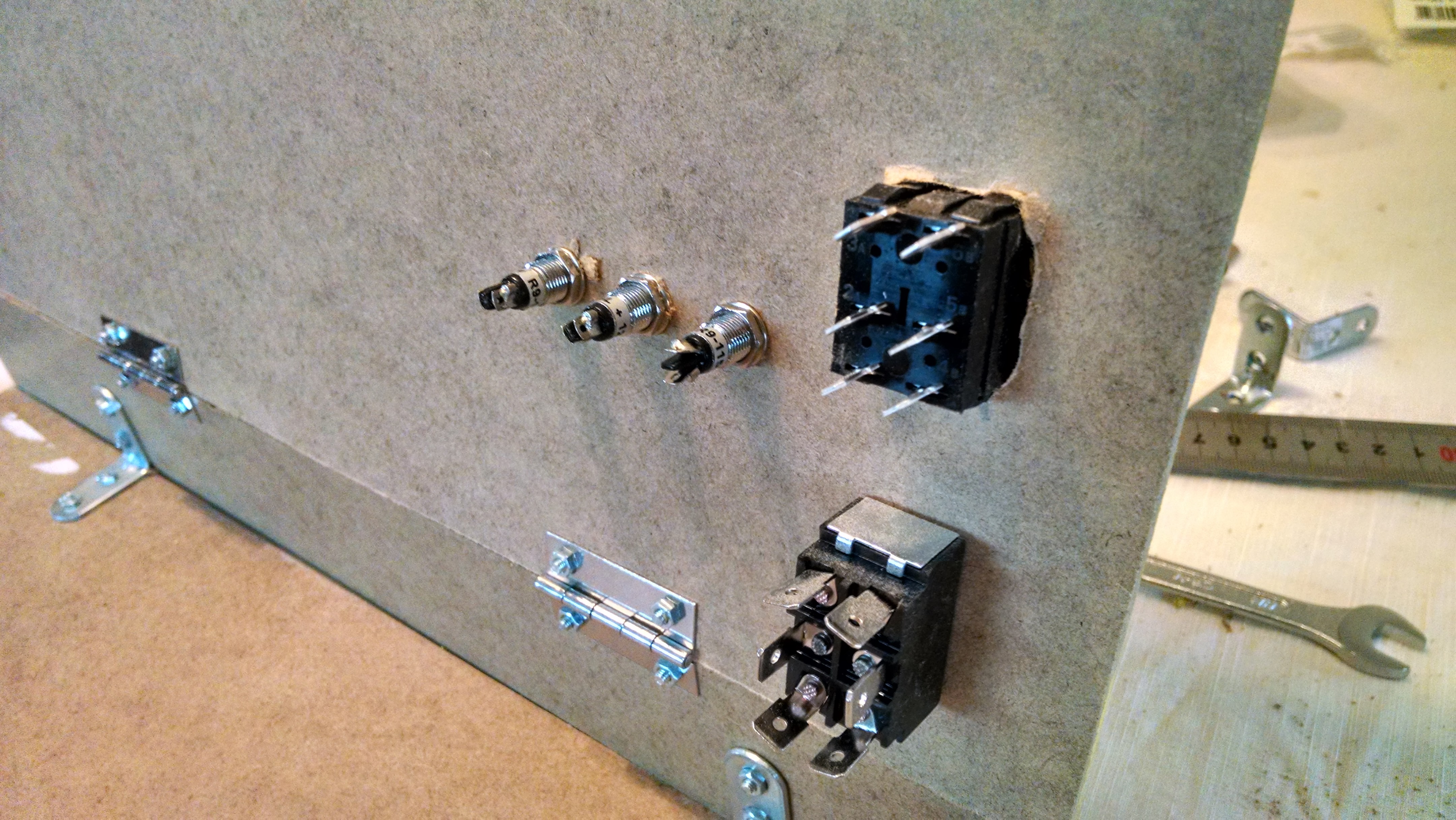
Pour l’instant j’en suis à la peinture des contre-plaqué et disposition des premiers éléments. J’attends également des interrupteurs et leds afin d’indiquer quel est le mode/circuit utilisé.
Premiers test de ma barre lumineuse.
quelques points :
– mettre au point dans le noir quai complet (j’étais en forêt) c’est dûr. l’hyperfocale est ton ami.
– toujours dans le noir, la lumière est un poilt trop puissante ce qui est plutot une bonne chose si on veut utiliser ça dans un endroit à moitié intéressant comme le champs de mars ou les tuileries.
– je me suis un peu dépéché a faire la barre et au final j’aurais dû prendre le temps de coder correctement la sauvegarde du pattern actuel dans le stick et le charger au démarrage. Le fait qu’il faille choisir son pattern a chaque fois au démarrage m’empêche de me placer correctement dans le champs, juste allumer le stick puis l’éteindre après.
– j’ai choisi un profilé aluminium un poil trop petit. Je n’ai pas la place de loger la batterie dedans comme je voulais le faire au début.
Comme c’est facile a faire, je pense que je racheterais un profilé et un autre arduino, (il me reste un autre ruban de led) et je verrais ce que je peux faire…